Share
Pin
Tweet
Send
Share
Send
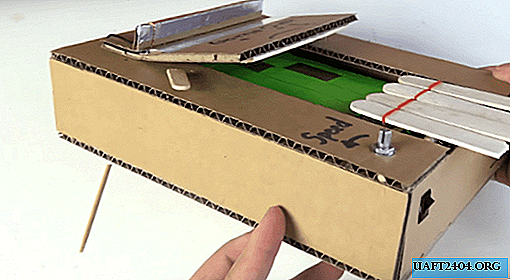
Aby utworzyć ramię robota, stosuje się kawałek falistej rurki z tworzywa sztucznego, pudełko z płyty CD, sznurka, kleju i taśmy elektrycznej. Sam manipulator jest wystarczająco silny, aby pomieścić na przykład butelkę lub telefon komórkowy.

Najpierw ułóż szablon ramienia robota na kartce papieru własną ręką. Zaznacz zawiasy dla każdego palca.

Z plastikowej rurki używanej przez elektryków do układania drutów wykonuj palce. Rurkę można łatwo przeciąć zwykłym nożem biurowym. Wytnij rurkę na długość równą odległości od końca palca do nadgarstka. Zrób to dla wszystkich palców robota. Na powstałych rurkach zaznacz zawiasy markerem, a następnie wykonaj cięcia w kształcie litery V dla każdego zagięcia.

Włóż i przymocuj nylonowy sznur do każdej rurki palca. Pozostaw końce wystarczająco długo (zawsze możesz je odciąć później).

Użyj starego pudełka na płyty CD, aby zdobyć kawałek plastiku. Za pomocą wyciętego kawałka plastiku połącz „palce”: przyklej „palce” tuż pod złączami kostkowymi.

Upewnij się, że ułożyłeś palce we właściwej kolejności.

Teraz możesz usunąć taśmę mocującą sznurek i wykonać kilka zwojów taśmy, aby palce były mocniej połączone.

Przyklej kciuk, jak pokazano na zdjęciu, i przymocuj go taśmą elektryczną, aby uzyskać siłę.

Za pomocą resztek pudełka na płytę CD utwórz nadgarstek.

Powstałe ramię robota najlepiej wzmocnić, wkładając je do sztywniejszej rurki.

Piankę można przykleić do „dłoni” i końców „palców”.

Ramię robota może być wykorzystywane w wielu projektach animatronicznych. Aby kontrolować rękę, możesz użyć serwomotorów, łącząc końce sznurka z „fotelem bujanym” zamocowanym na ich osi. Dwa serwa wystarczą, aby ramię robota ożyło. W tym przypadku jeden siłownik jest podłączony do kciuka, a drugi do reszty. Aby Twoja ręka wyglądała bardziej imponująco w projektach animatronicznych, możesz założyć na nią miękką, cienką rękawiczkę.
Źródło: myrorot.ru
Share
Pin
Tweet
Send
Share
Send